2025-08-12 17:53

![]()

在理想i8发布会举行之前,理想汽车董事长兼CEO李想与前同事、维他动力联合创始人赵哲伦分享了自己关于“选择”的长期主义哲学。
“要选‘长’的,这件事情最好要很长时间才能成功,如果是个很短时间就能成功的,就意味着所有人都能成功,反而没什么壁垒。选‘长’的,跟时间做朋友,就有耐心了。”李想说。
当晚,外界都以为理想i8是唯一主角。但这是一场有双主角的发布会,李想在现场宣布,理想VLA司机大模型将随理想i8一同交付。
作为发布会上的另一个主角——VLA其实更能反映李想的长期主义哲学。

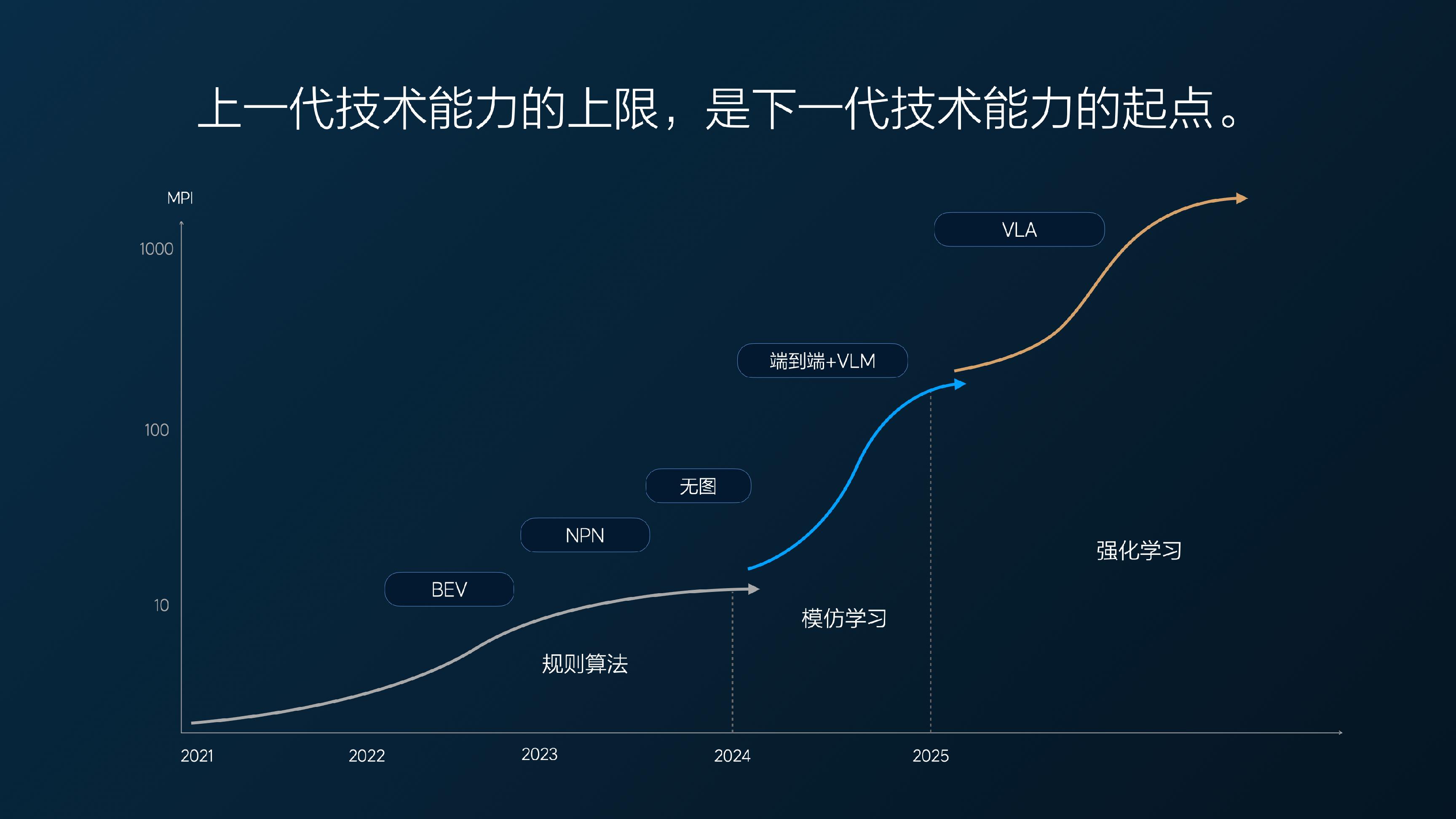
2025年的智能驾驶战场,弥漫着“短平快”的焦虑。数据上,部分车企依赖人工采集“老司机数据”,甚至雇佣数百人实车路测,成本高昂却效率低下。算法上,端到端+VLM架构遭遇瓶颈——训练数据突破1000万Clips后,性能增长缓慢。评测上,实车测试无法复现极端场景,接管里程的数字繁荣背后隐藏着极端场景的未解难题。
面对这些现象,李想曾用这样一句话提醒公司乃至整个行业——端到端模型像猴子开车,它能够学习人类行为,但并不理解物理世界。
李想的犀利比喻,直指行业痛点——短期可落地的技术≠真正智能。基于这样的信念,理想没有简单粗暴地用规则算法“修补”端到端缺陷,而是选择了一条更艰难的长期主义道路:推翻现有架构,自研VLA司机大模型。
为何VLA是“正确的事”
区别于端到端架构的模仿学习,VLA司机大模型的优势是通过强化学习不断进化,让机器理解“为什么这样做”。这不仅关乎技术路线,更是一场关于用户体验、商业效率与技术野心的深刻重构。
首先,VLA能像经验丰富的司机一样预判风险(如盲区车辆切入)。理想汽车自动驾驶研发高级副总裁郎咸朋希望,未来VLA能将事故里程(MPA)提升至人类驾驶的10倍,做到600万公里才出一次事故(当前理想辅助驾驶为350-400万公里/次事故,人类驾驶约60万公里/次事故)。
其次,VLA 还能“越开越像你”。激进派车主获得高效变道,稳健派车主享受平顺巡航——VLA通过持续学习用户习惯,让车辆“越开越像主人”。郎咸朋描绘未来:“强化学习是有这个能力来支撑它这个车越开越像你的风格或体验,之前端到端可能还不具备这样的能力。”
郎咸朋透露,未来不同家庭成员上车,系统将通过Face ID自动切换至其偏好的驾驶风格,车辆真正成为懂你的“个性化司机”。
理想没有让自己陷入“百万公里实车测试”的重资产泥潭,而是选择用VLA撕开了行业的成本伪装。当然,仿真不是为了省钱所做出的选择,它是能跑赢技术迭代的选择——实车测试永远追不上Corner Case的产生速度。
郎咸朋揭示了效率本质:“任何技术的提升一定伴随着研发流程的变革,工业时代来临后,刀耕火种的流程被机械化替代……而进入了VLA大模型时代,测试效率是提升能力的核心因素。”
2025年上半年,理想依托世界模型的仿真测试累计里程已突破4000万公里,每天的测试里程最大的峰值可达到30万公里,这是实车测试无法企及的速度与规模。
郎咸朋点明VLA快速迭代的秘诀:“VLA评测就像之前的实车评测一样……我们的VLA仿真评测已经在超级对齐里做好了基础,现在已经有超过40多万个场景评测了。” 这构成了对手难以短时间复制的核心壁垒。
在VLA的长跑中,理想展现出惊人的战略定力——精准平衡短期妥协与长期收益。
在用户端,理想接受初期功能保守,例如地库限速最初为10 km/h ,现在逐渐提升到15km/h,换取绝对安全冗余。但郎咸朋承诺“进一步提升能力并且做好测试之后,我们会逐步打开这个能力的车速上限”。
在技术端,理想牺牲端到端短期数据优势(堆Clip数),换取VLA的“思维涌现”能力。郎咸朋对比鲜明:“如果还是沿着端到端思路去做所谓VLA,你的速度一定会变慢……首先你要训1亿个Clips需要多大的训练算力?”
同时,理想专注构建仿真评测壁垒。郎咸朋清醒判断:VLA仍处技术周期早期,首要任务是“很好地验证这套系统”。
市场反应印证了VLA的长线价值。今年1月发布的《理想智能驾驶2024年出行报告》显示,理想汽车智能驾驶试驾率达到72.4%,试驾满意度为92%,30万以及40万以上车型AD Max交付量占比分别为75.4%、84.6%。
可以看出,理想辅助驾驶不再是用户购车决策中的弱势项,而是驱动品牌销量增长的重要因素,这也是VLA司机大模型与理想i8一同发布、一同交付的原因。
郎咸朋希望,2025年底将MPI接管里程提升至400-500km,到明年能够达到1000km。“明年我们如果到了1000km的MPI水平,可能会给用户这种感觉真的到了一个VLA的ChatGPT的时刻。”理想汽车自动驾驶高级算法专家詹锟说。
对VLA的坚定选择,背后是理想的技术信仰。VLA是理想对行业本质问题的回答:真正的智能不是“能做什么”,而是“为何这样做”。
数据、算法、算力、工程四重难题
自研VLA,这是人迹罕至的路,郎咸朋的团队知道,啃下这块“硬骨头”,需要一场从数据、算法、算力到工程能力的全方位“长征”。
在数据问题上,截至2025年7月,理想积攒了累计43亿公里辅助驾驶里程、12亿公里有效回传数据——这是理想从2020年理想ONE时代就开始布局的“数据金矿”。
接下来是数据清洗的“炼金术”。理想剔除了近1/4“不合规驾驶行为”,仅保留“老司机数据”。理想汽车自动驾驶高级算法专家湛逸飞解释:“我们需要的数据用一个词总结叫‘老司机数据’。”他们在云端部署模型,甚至利用大模型对数据进行“老司机”标准的严苛筛选。
为了实现世界模型的颠覆性革命,理想做出了一个大胆决策:用仿真测试替代90%实车路测。通过三维重建与场景泛化技术,1:1还原极端场景。这源于一个严峻的事实,即实车测试永远无法100%还原事故现场。
湛逸飞透露,依托强大的世界模型,单日峰值测试里程达到30万公里,2025年上半年累计超4000万公里。
这并非一蹴而就。2024年,理想进行了150多万公里实车测试,并非为了数据本身,而是为了验证和校准仿真环境的可靠性。湛逸飞坦言,最初世界模型仿真复现率是存在问题的,团队通过一年时间,针对漏洞进行大量工程和算法优化,将仿真一致性提升至99.9%以上。
在算法问题上,李想曾尖锐评价端到端模型“像猴子开车”——能模仿动作,却无逻辑思维。VLA的突破,核心在于赋予机器“思考的能力”。
CoT思维链(Chain-of-Thought)是VLA的核心突破。它能实时呈现决策逻辑(如屏幕显示“拒绝逆行因安全合规”),彻底解决端到端“无脑执行”的痛点。换句话说,理想不是在教AI开车,而是在教它理解人类世界的规则。
面对大模型部署车端的世纪难题,理想选择了最硬核的自研之路。
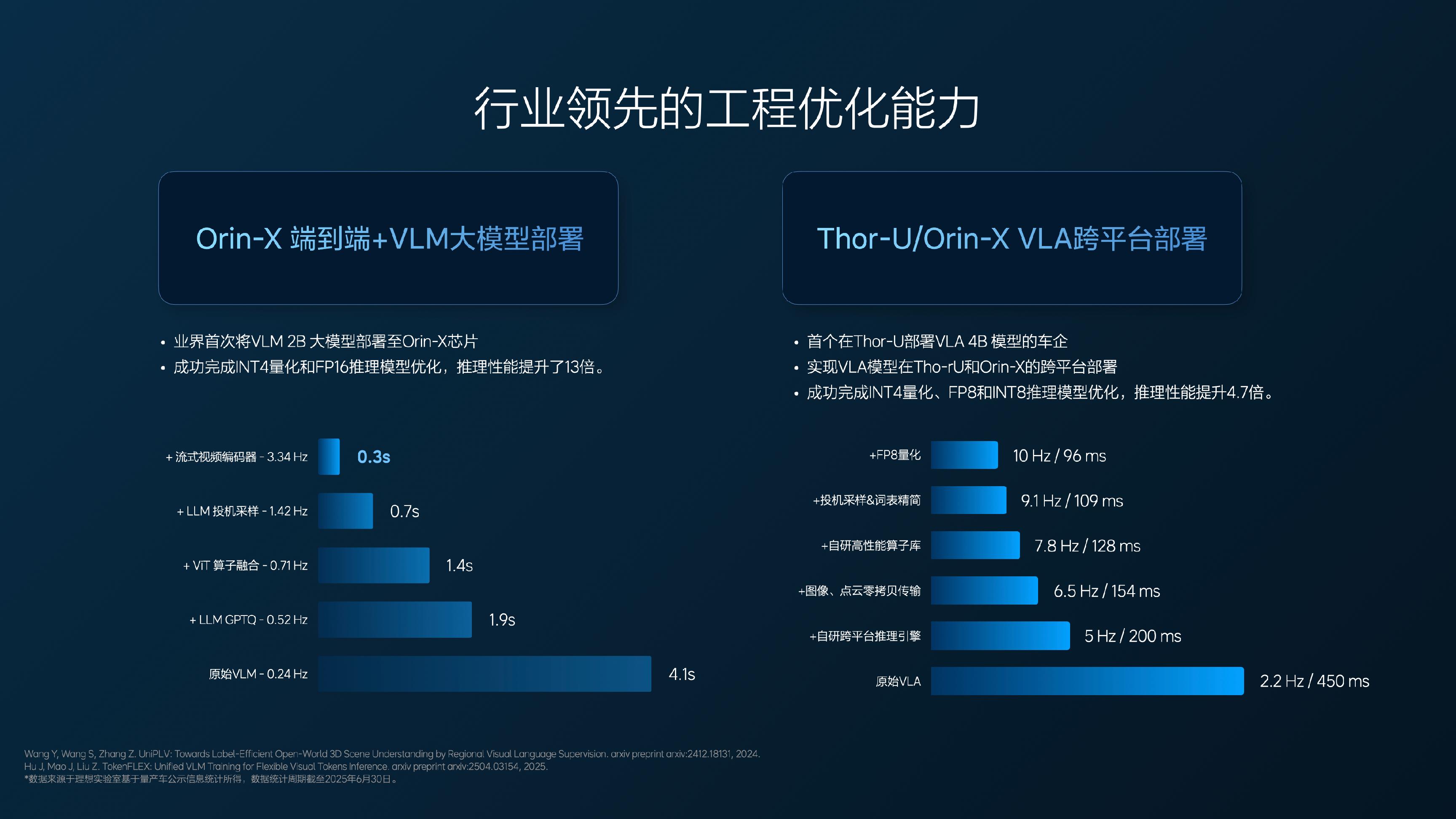
推理速度慢?今年,理想汽车将成为首个在Thor-U部署VLA模型(4B的MoE混合专家模型)的车企。理想汽车自动驾驶高级算法专家詹锟自豪地说:“目前没有任何一个架构是这样的,这是我们与基座团队共同研发,专门对嵌入式芯片做了定制的MoE混合专家架构,在这个架构上我们才能达到这样的效果。”
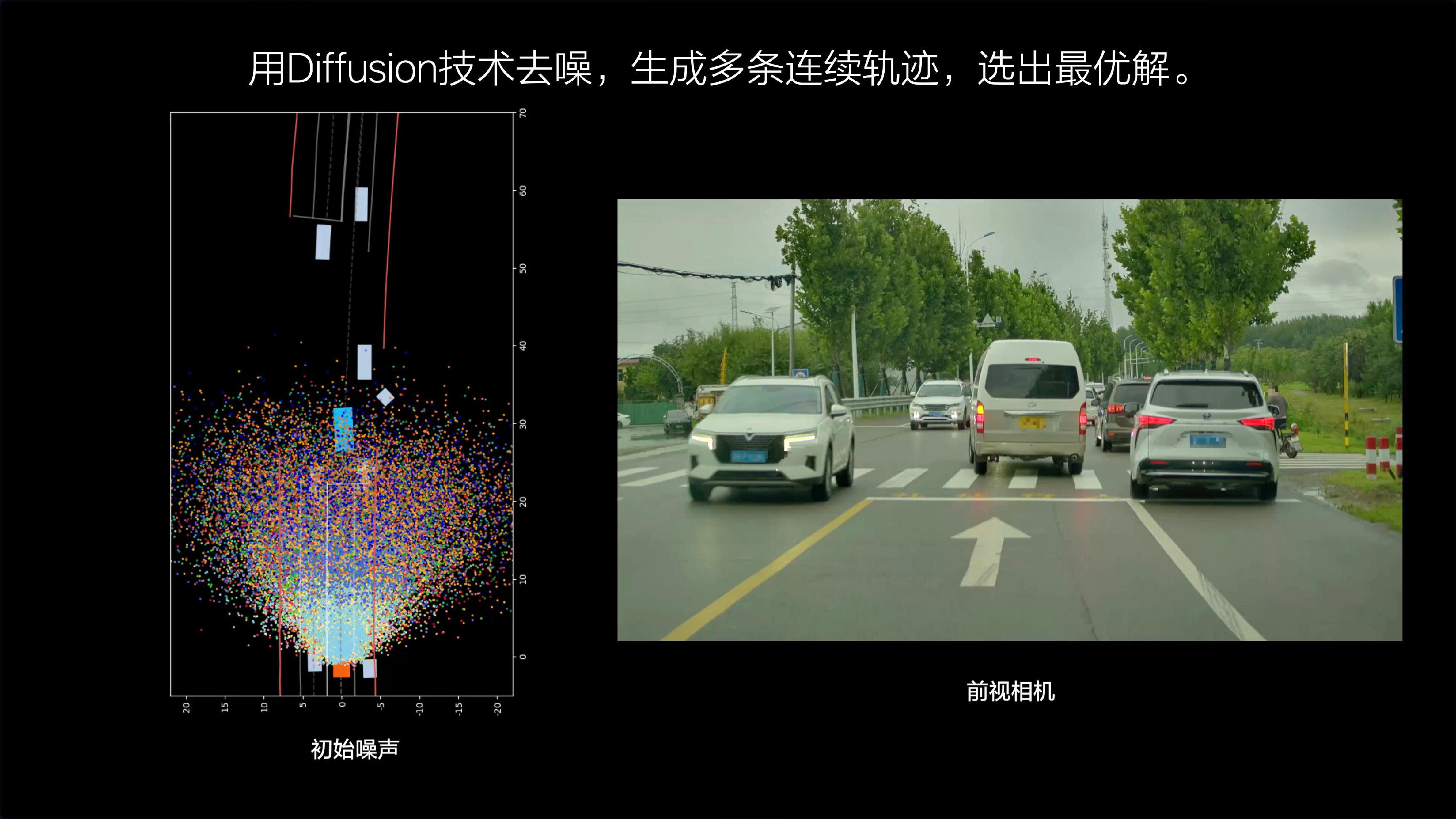
轨迹生成时延高?理想不是直接使用标准Diffusion,而是进行了推理的压缩。詹锟揭秘:“以前Diffusion可能要推理10步骤,我们使用了flow matching流匹配只需要推理2步就可以了,这方面的压缩也是导致我们真正能够部署VLA的本质原因。”效果就是,轨迹生成时延仅15毫秒。
模型部署难?理想将32B云端大模型蒸馏至3.2B车端MoE模型。詹锟团队完成了看似不可能的任务:“我们最早训练了一个32B的云端大模型……把它做出的思考和推理流程蒸馏到3.2B的MoE模型上。”
在算力问题上, 理想关心“有效算力”。最终,理想在Thor芯片上实现700TOPS有效算力。詹锟解释秘诀:“传统的训练一般都会拿FP32去做训练...我们有一个训练过程叫QAT(量化感知训练)……在训练过程中,我把参数就把它变成INT8或FP8。”
詹锟回顾攻坚过程:“我们的工程团队、部署团队做了非常多的工作,包括我们魔改CUDA的底层,重写PTX底层指令,才能实现现在的效果。”
为了打破“芯片歧视链”,理想让Orin X芯片和Thor芯片车型都能获得VLA,这源于理想工程部署能力的一贯积累。“从早期在地平线J3部署高速NOA,到在Orin芯片上部署大模型,再到现在在Thor芯片上部署VLA高频快速的大模型……很多技巧和分析方法,以及基础设施的工具链都继承下来了。”詹锟说。
数据、算法、算力和工程能力的四位一体,构筑了理想VLA的护城河。而这场啃硬骨头的长跑,旨在回答一个问题:真正的智能,是理解“为何这样做”。
技术背后的价值观
当VLA司机在双向单车道上拒绝执行“左转避开三轮车”的指令时,一场关于机器价值观的公开拷问被引爆。这不是技术故障,而是理想团队主动选择的安全底线。郎咸朋深知,VLA的每一步突破,都伴随着尖锐的质疑与艰难的权衡——这是啃硬骨头必然付出的代价。
如何应对用户信任带来的风险,是理想正在面对的第一个问题。
“请左转避开三轮车。”——面对这样的指令,VLA在双向单车道上陷入沉默。詹锟表示,这不是技术故障,是价值观的主动选择。
一方面,复杂指令存在“通识门槛”,例如“前进10米”依赖物理常识涌现。詹锟解释核心原理:“当量级达到一定规模时,会涌现出组合泛化的能力……它懂了数字,懂了米数,就能组合应用。” 但这需要海量数据与迭代时间。
另一方面,交互权责存在模糊地带。用户闲聊提及“左转”可能误触发指令,理想i8发布会上播放的岳云鹏驾驶VLA车辆的视频,就以一种轻松的表达方式展现了这个问题。
“我们现在肯定是为了保持准确,防止出现一些误判,比如你本来不想操控车的行为,突然去操控了,这肯定是存在一些还需要迭代和优化的地方。”詹锟坦言挑战。而理想的解决方案指向“统一大脑”,让车辆对用户的想法有更精准的理解。
如何应对效率、安全、舒适的“不可能三角”,是理想正在面对的第二个问题。
郎咸朋强调,理想的选择,是安全大于舒适和效率。按照这一原则,现阶段车辆即便走错路,VLA也不会通过一些危险的驾驶动作进行纠正。只有在保证安全的前提下,VLA才会去努力让行程更舒适和更高效。

当然,任何选择都会付出代价。“代价就是初期体验保守。”郎咸朋坦言,他同时承诺,我们会逐步打开能力上限。
如何应对行业内卷背景下的对手围剿和外界质疑,是理想正在面对的第三个问题。
对于理想而言,那些采取“短平快”打法的对手,它们炫耀参数的行为并不值得自己焦虑,因为单纯的参数优势,就像厨师夸耀灶台火力旺一样,其实,食客只在乎菜是否烧糊了。
从落地节奏看,质疑声认为“端到端生命周期仅1年,VLA是否昙花一现”,郎咸朋表示:“VLA架构会延续到机器人繁荣之后,才可能被其它技术替代,它是一个相对长期的架构,技术潜力非常大,也更像人类的智能发展规律。”
面对各种质疑,理想应对之道的根基是三大原则:一是安全绝对优先,MPA事故里程目标 600万公里(优于人类驾驶员10倍),用数据兑现承诺;二是有效算力至上,以 FP8/INT4量化革命让每颗芯片“鞠躬尽瘁”;三是用户共建迭代,134万车主接管数据驱动强化学习。
写在最后
理想汽车的VLA“长征”,远非一场单纯的技术突围。它是在智能驾驶喧嚣的竞技场上,对行业浮躁与捷径诱惑的一次“拨乱反正”。当整个行业被“短平快”的焦虑裹挟,沉溺于算力参数的军备竞赛时,理想选择了一条布满荆棘的自研之路。
这条路的艰难显而易见,但理想的创新内核,恰恰体现在这份对困难的坦然拥抱与主动选择上。李想所言的“选择‘长’的”,其深意不仅在于时间的长度,更在于路径的深度——深入本质,重构规则。
 京公网安备 11010802028547号
京公网安备 11010802028547号
 购物车
购物车






