2026-01-01 10:00

![]()

物理 AI 作为连接虚拟与现实的核心范式,正成为衡量全球科技企业核心竞争力的新标尺。当人工智能竞争从数字世界的算法博弈迈入物理世界实景交互的深水区,一场关乎产业规则重构的科技竞赛已进入决胜阶段。而自动驾驶作为 AI 与物理世界交互的核心战场,已形成中美双极引领的发展态势。
继 2024 年测评特斯拉 FSD V12 后,2025 年 12 月上旬,小鹏汽车 CEO 何小鹏赴美重测 FSD V14,并实地体验特斯拉 Robotaxi,同时与 30 多位美国 AI 专家进行深入沟通。这场跨国技术对话的背后,是两大科技企业的高度共识:以物理 AI 为底层逻辑,跳过争议性的 L3 过渡阶段,直接用 L4 级架构与进化逻辑迭代 L2 级产品,通过“纯视觉 + 端到端 + 大模型”路径,实现自动驾驶能力的指数级跃升。
此前一个月的 2025 小鹏科技日上,何小鹏已发布第二代 VLA 模型。如今,伴随该系统量产进入倒计时,这一共识正转化为行业变革的实际推力。中国作为全球最大的智驾应用市场,依托复杂场景的训练积累与全栈自研的技术沉淀,助力本土科技企业跃升为定义下一代 AI 核心范式的关键力量,一场以效率革命为核心的自动驾驶商业化浪潮,也即将正式拉开序幕。
物理 AI 赛道形成“中美双极”竞争
过去十年,AI 革命聚焦数字世界的认知与生成;当下,物理 AI 浪潮则标志着人工智能走出屏幕,通过具身载体与物理世界深度交互。“物理 AI 不是简单的技术升级,而是下一代产业革命的核心驱动力。”英伟达创始人黄仁勋如此判断。
作为衡量国家 AI 综合实力的新标尺,自动驾驶融合环境感知、实时决策、动态交互等复杂需求,成为检验通用人工智能落地能力的最佳试金石。
特斯拉 CEO 马斯克近两年反复强调 “Real-World AI”,将企业定位为“现实世界 AI 公司”,通过 FSD 与 Robotaxi 验证技术能力;中国的小鹏汽车则完成物理 AI 全栈自研体系构建,成为全球唯一实现这一突破的企业,与特斯拉共同构成物理 AI 赛道的“中美双极”。
双极格局的形成,源于技术路线的高度共识。特斯拉坚持纯视觉方案,依托端到端大模型习得驾驶策略,凭借海量车队数据持续迭代;小鹏打造芯片、硬件、大模型全栈自研体系,以“纯视觉 + 端到端”构建软硬自研、跨域融合优势。两大企业的选择,标志着自动驾驶行业告别路线之争,迈入技术收敛阶段。
传统方案依赖高精地图与预设规则,成本高、更新滞后且难以应对长尾场景。而“纯视觉 + 端到端 + 大模型”路线,通过摄像头感知环境并直接生成驾驶指令,无需语言转译,既降低硬件成本,又能依靠海量数据优化泛化能力。马斯克曾比喻:“人类仅靠双眼就能驾驶,汽车也应如此。”这种模拟人类的路线,被证实效率最高、进化潜力最大。

中国企业的核心优势始于场景、成于自研。小鹏第二代 VLA 是“首个量产物理世界大模型”,其创新性地去掉“语言转译”环节,实现从视觉信号到动作指令的端到端直接生成,彻底颠覆行业传统的 “V-L-A” 架构,不仅让自动驾驶反应速度与决策精度大幅提升,也从技术底层验证了 L2 直通 L4 的可行性。
支撑这一目标的,是中国独一无二的道路场景——混合交通流、不规则路口、突发行人穿行等,构成全球最丰富的“AI 训练场”,倒逼模型具备更强的环境理解与决策灵活性,让小鹏第二代 VLA 在长尾场景处理中更具韧性。
更关键的是,小鹏的全栈自研体系构建了核心壁垒。从自研图灵 AI 芯片到 VLA 大模型,从车端算力优化到云端数据处理,其实现了“芯片—算子—模型”全链路自研。这使其能够部署 720 亿参数的云端基座模型,每五天完成一次全链路迭代;车端第二代 VLA 参数达数十亿级,较行业普遍仅千万级的规模提升约 10 倍。
值得关注的是,中美双极竞争并非零和博弈,而是在携手定义行业标准。特斯拉研发飞行汽车,外媒称其“跟随小鹏步伐”——小鹏汇天自 2013 年布局该领域,“陆地航母”全球订单超 7000 台,量产工厂已试产,计划于 2026 年交付。从自动驾驶到飞行汽车、人形机器人,中美顶尖企业同向推动出行革新,物理 AI 是这场变革的核心底层逻辑。
L2–L4 路径已被特斯拉与小鹏共同验证
事实上,去掉语言转译环节,为更高阶的智能辅助驾驶提供了强有力的支撑。小鹏自动驾驶负责人刘先明在接受采访时表示,语言是结构化、离散的,而现实世界是连续、非结构化的,驾驶博弈需要瞬时反应,中间的语言转译环节既容易造成信息丢失,也会产生决策延迟。
第二代 VLA 拆掉“语言”这一中间层,让模型直接从“路景到驾驶动作”的海量数据中学习物理世界规律,就像人类依靠直觉应对复杂场景。实际路测中,第二代 VLA 在遇到查酒驾场景时,能够自动识别交警手势并减速停车,在驾驶员完成检测后再自主提速驶离,全程无需人类接管。
何小鹏赴美实测,成为两条技术路线相互印证的最佳注脚。纵向看,特斯拉 FSD V14 相较 V12 的进化堪称“代际跨越”,在相同测试路线中,车道保持、复杂路口决策等表现全面提升,凸显大模型升级带来的能力涌现。
基于中国更复杂路况的学习和进化,小鹏第二代 VLA 在更具挑战性的场景中展现出差异化优势。例如,在何小鹏对比体验小鹏二代 VLA 与 FSD V14 时,视频显示:FSD V14 直行过程中,右前方丁字路口人行横道上站有四五人,但这些人并未进入车道,系统却进行了不必要的减速,整体策略偏保守。而在广州的相似右转路口场景中,小鹏第二代 VLA 面对后方电动自行车紧贴切入,仅作轻微减速便顺利通过。
此外,在高速场景下,小鹏二代 VLA 在广州高速路上的超车、变道表现非常流畅。FSD V14 在右前方变道时,遭遇车流量较大且没有匝道的情况,本可以快速切入右侧车道,但系统执行较慢。虽然这种驾驶逻辑“更美国”,但在中国实际路况中,可能就难以完成变道。
“这不是谁优谁劣的对决,而是证明我们都走在正确的道路上。”何小鹏测试后表示,特斯拉 FSD 的迭代速度验证了大模型驱动路径的正确性,而小鹏的表现则证明,中国场景训练出的模型在复杂环境中更具优势。
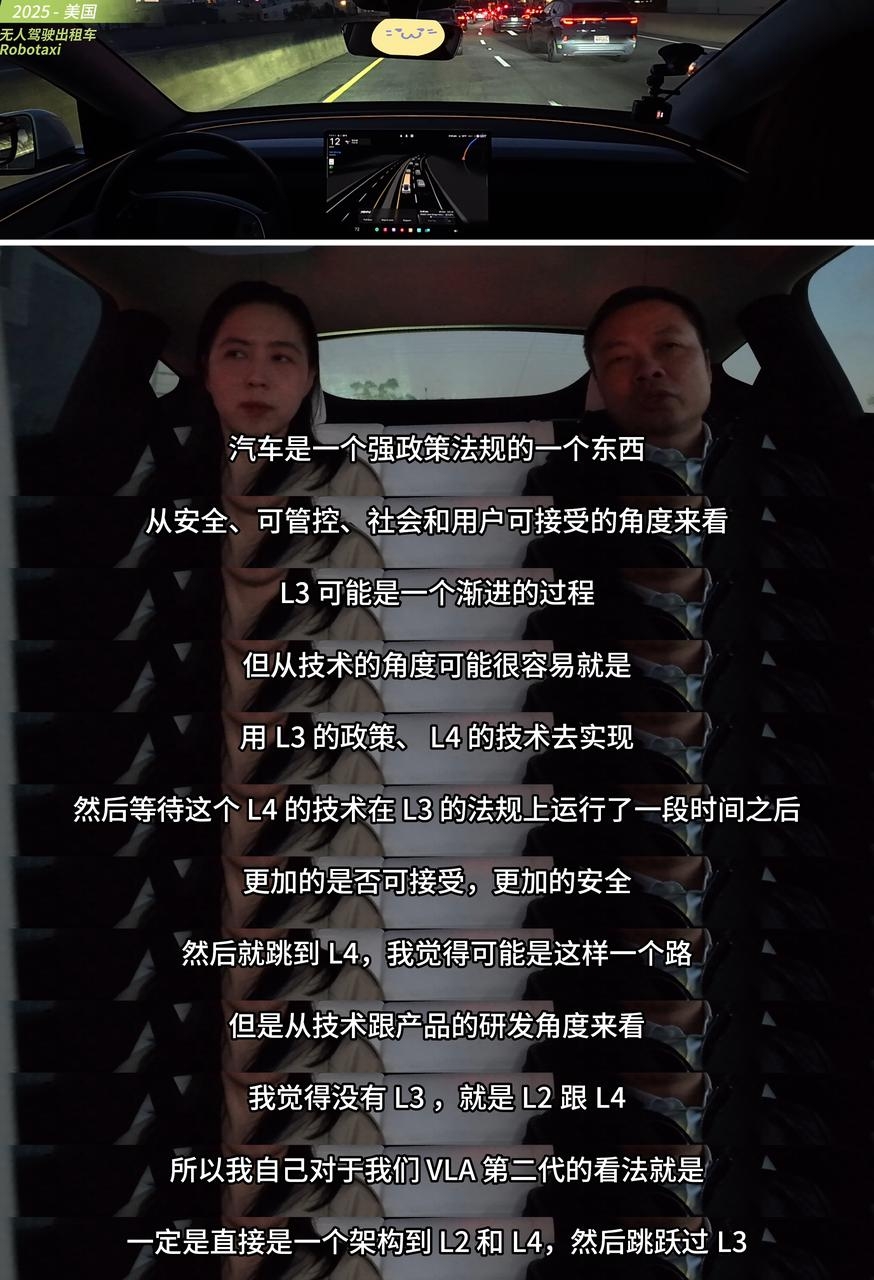
这种共识背后,是对 L3 过渡属性的集体认知。特斯拉将 Robotaxi 能力下放至 FSD V14,小鹏在持有 L3 测试牌照的情况下直指 L4。两家企业都清楚,责任划分模糊的 L3 既难以满足用户安全需求,也无法实现商业化规模效应,终将被“人负责的 L2”和“车负责的 L4”所取代。
技术路径的可行性,也已被清晰的落地节奏所支撑。小鹏汽车副总裁于涛曾透露,小鹏具备 L4 级能力的第二代 VLA 平台,预计将于 2026 年第一季度实现量产落地。届时,小鹏将推出在软硬件层面均达到 L4 级自动驾驶水平的量产车型。
相较于 Waymo 依赖高精地图与远程协助的传统路线,特斯拉与小鹏的技术路径具备更强的商业潜力。以 Waymo 为代表的激光雷达、后装量产路线企业,仅能在特定区域落地 Robotaxi 商业化,且深陷“L4—量产—服务范围”的不可能三角。而“纯视觉 + 端到端”路线则能摆脱高精地图束缚,依托数据迭代持续拓展服务边界,并通过量产车型摊薄研发成本,筑牢规模化运营根基。
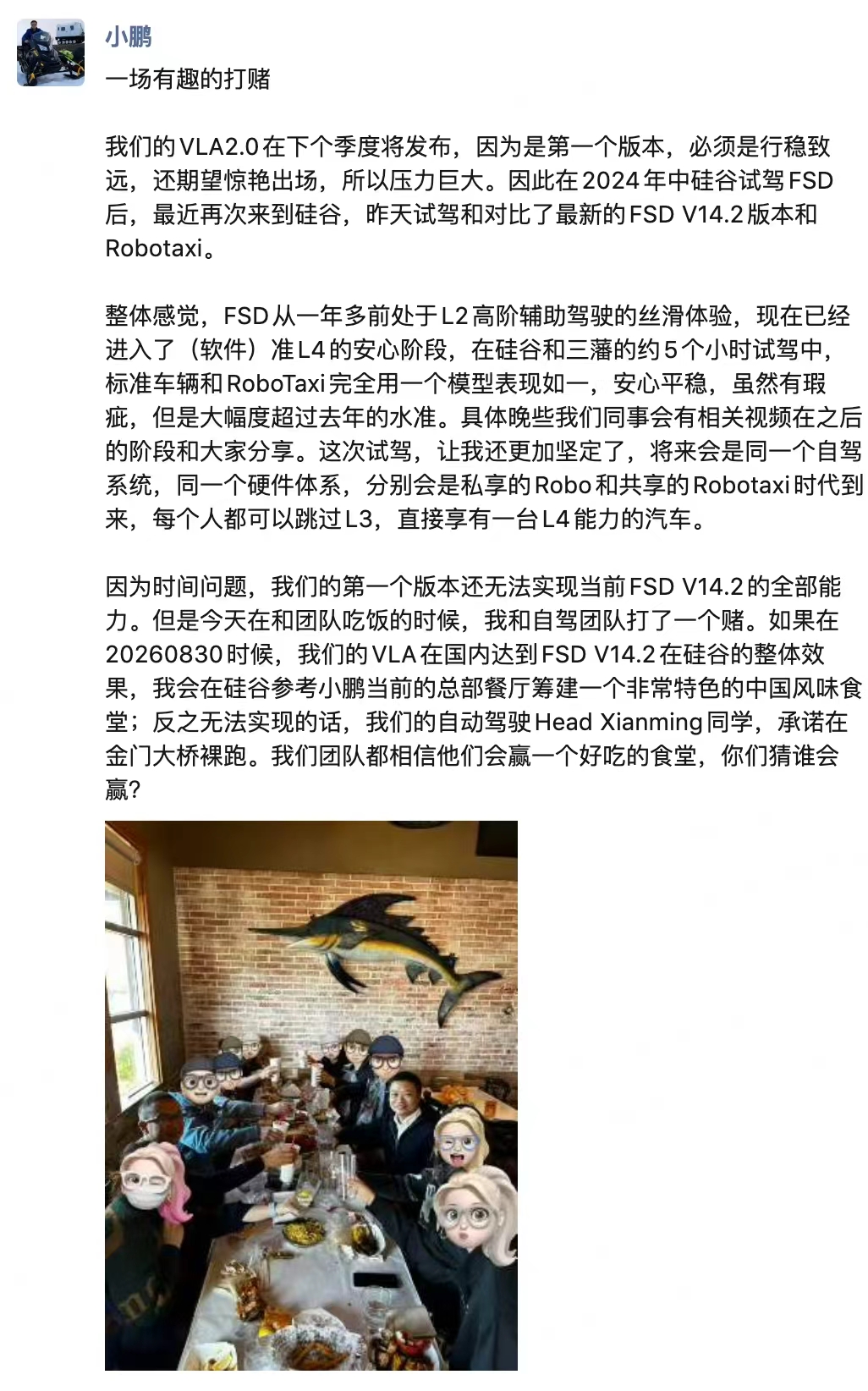
何小鹏与北美研发团队立下赌约,尽显对技术路径的信心。双方约定,若在 2026 年 8 月 30 日前,小鹏 VLA 2.0 在国内达到 FSD V14 当前于硅谷的表现水平,硅谷员工将获筹建中式食堂;若未达标,则自动驾驶负责人将赴金门大桥“裸跑”。这份江湖气的激励背后,是团队依托中国场景海量数据与高效研发闭环,对技术迭代速度的笃定判断。
中国场景优势 + 技术复用给小鹏的机会
曾被视为自动驾驶落地阻碍的中国复杂道路场景,如今已成为锤炼 AI 能力的宝贵财富,转化为本土企业独有的战略资源。
中国本地化场景的核心优势,在于极致复杂且极具特色的道路环境。不同于欧美相对规整的交通秩序,中国道路呈现出混合交通流密集、不规则路口遍布、突发状况频发等鲜明特征。
早高峰环路人车混行,老城区窄巷要求车辆精准穿行,乡村无信号灯路口依赖交通参与者的默契博弈,节假日高速还可能出现占道、团雾等极端情况。这些路况不断促使小鹏模型强化环境理解、意图预判与应急决策能力。
场景复杂性直接转化为小鹏的数据优势。第二代 VLA 训练数据量达 1 亿 clips,相当于人类司机连续驾驶 6.5 万年的极限场景总和,不仅覆盖城市拥堵、山区会车、恶劣天气、高速巡航等常规场景,还囊括中国式过马路、三轮车随意变道等大量长尾场景。其中,不规则路口交互数据远超欧美市场,助力模型学习更通用的物理世界交互规律。
数据优势进一步带来模型泛化能力的指数级提升。面对海外系统频频失灵的中国特色场景,小鹏第二代 VLA 已实现精准适配:老城区窄路会车可预判对向车辆意图并自主调控车速车距;无信号灯乡村路口可通过轨迹分析做出安全决策;在查酒驾场景中,能够完成减速、停车、驶离的完整交互流程。这也是其在实测中表现优于特斯拉 FSD V14 的重要原因之一。
中国场景还推动小鹏构建起高效的技术迭代闭环。其 3 万卡云端算力集群运行效率超过 90%,可支撑 720 亿参数基座模型每五天完成一次全链路迭代;依托庞大的车辆保有量与出行需求,小鹏形成“数据采集—模型训练—实车验证—数据回流”的快速闭环,相较海外企业动辄数月的迭代周期,具备显著效率优势。
技术复用进一步放大场景优势,破解自动驾驶商业化的不可能三角。传统 Robotaxi 需单独开发技术体系,硬件成本高,难以规模化落地。小鹏实现 Robotaxi 与第二代 VLA 同源研发,共享硬件、安全冗余及智驾能力,可同时赋能私人车型的 L2 智驾与 Robotaxi 的 L4 无人驾驶,无需两套系统,硬件成本较传统方案降低超过 40%。

2026 年将成为小鹏自动驾驶商业化的关键节点,小鹏将推出软硬件都达到L4级的车辆。中国本土化场景与全栈自研物理 AI 体系的双重加持,或将让小鹏在下一轮竞赛中站稳领跑者角色。小鹏 2026 年量产 L4 级车型与 Robotaxi,也将标志中国企业从全球 AI 应用市场的参与者,成长为定义下一代 AI 核心范式的关键力量。
不过,值得一提的是,尽管中国丰富的路况场景助力小鹏等本土科技企业形成优势,何小鹏也坦言,特斯拉 FSD 目前在华仅落地 V13 版本,这对特斯拉并不公平。他期待在 2026 年底,与特斯拉“满血版”系统在欧洲市场同台全面竞技。这种追求公平竞争的心态,既体现了小鹏汽车的技术底气与全球视野,也彰显其不依赖场景红利、只凭硬核实力参与全球竞赛的行业担当。
 京公网安备 11010802028547号
京公网安备 11010802028547号
 购物车
购物车